Comparison between Hector and GMappingGMapping is a RBPF-based SLAM method which solved two thorny problems of particle filter. First, it presented adaptive techniques for…Nov 28, 2021Nov 28, 2021
Rao-Blackwellized particle Filter and GMappingRao-Blackwellized particle filters have been used as an effective means to solve the simultaneous localization and mapping problem. This…Nov 28, 2021Nov 28, 2021
HECTOR SLAMThe map built in the process of SLAM is an occupancy grid. Each cell in the occupancy grid can have either of three different values:Nov 28, 2021Nov 28, 2021
ORB SLAMORB-SLAM is based on the ORB descriptor which is invariant to large view point and rotational changes. The back-end based on bundle…Nov 28, 2021Nov 28, 2021
Real-Time Appearance-Based MappingRTAB-MAP (Real-Time Appearance-Based Mapping) is a graph-based SLAM approach using RGBD cameras, stereo cameras, or a 3D Lidar. It is based…Nov 28, 2021Nov 28, 2021
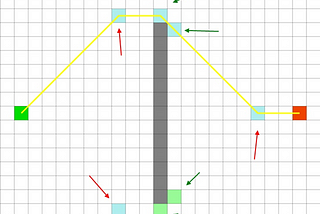
Understanding Jump Point Search (JPS) AlgorithmThe A* algorithm is a common and straightforward optimization of breadth-first (Dijkstra’s) and depth-first searches. The Jump Point Search…Nov 28, 2021Nov 28, 2021
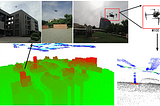
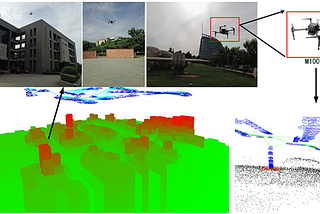
Visual SLAM in UAVVisual Simultaneous Localization and Mapping (VSLAM) using multirotor Unmanned Aerial Vehicles (UAV) in an unknown environment have grown…Nov 28, 2021Nov 28, 2021
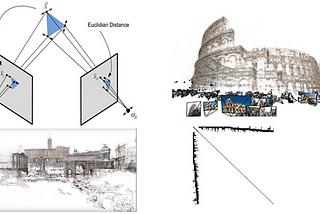
Bundle Adjustments & Reprojection ErrorBundle adjustment is a joint state estimation technique to estimate the pose of 3D coordinate points describing the scene geometry, through…Nov 28, 2021Nov 28, 2021
KinectFor measurement model used in SLAM, the most commonly used vision based sensors are 3D/Depth camera which provides 3D data in the form of…Nov 28, 2021Nov 28, 2021
Signed Distance FieldEuclidean Signed Distance Field (ESDF) & Truncated Signed Distance Field (TSDF), are increasingly being used for collision checking and…Nov 28, 2021Nov 28, 2021