Dibyendu BiswasComparison between Hector and GMappingGMapping is a RBPF-based SLAM method which solved two thorny problems of particle filter. First, it presented adaptive techniques for…5 min read·Nov 28, 2021----
Dibyendu BiswasRao-Blackwellized particle Filter and GMappingRao-Blackwellized particle filters have been used as an effective means to solve the simultaneous localization and mapping problem. This…5 min read·Nov 28, 2021----
Dibyendu BiswasHECTOR SLAMThe map built in the process of SLAM is an occupancy grid. Each cell in the occupancy grid can have either of three different values:4 min read·Nov 28, 2021----
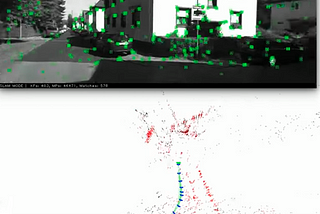
Dibyendu BiswasORB SLAMORB-SLAM is based on the ORB descriptor which is invariant to large view point and rotational changes. The back-end based on bundle…5 min read·Nov 28, 2021----
Dibyendu BiswasReal-Time Appearance-Based MappingRTAB-MAP (Real-Time Appearance-Based Mapping) is a graph-based SLAM approach using RGBD cameras, stereo cameras, or a 3D Lidar. It is based…4 min read·Nov 28, 2021----
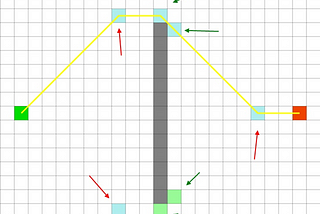
Dibyendu BiswasUnderstanding Jump Point Search (JPS) AlgorithmThe A* algorithm is a common and straightforward optimization of breadth-first (Dijkstra’s) and depth-first searches. The Jump Point Search…4 min read·Nov 28, 2021----
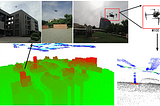
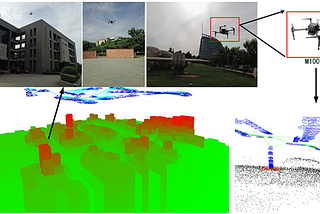
Dibyendu BiswasVisual SLAM in UAVVisual Simultaneous Localization and Mapping (VSLAM) using multirotor Unmanned Aerial Vehicles (UAV) in an unknown environment have grown…4 min read·Nov 28, 2021----
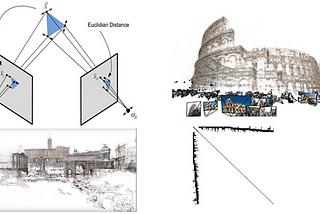
Dibyendu BiswasBundle Adjustments & Reprojection ErrorBundle adjustment is a joint state estimation technique to estimate the pose of 3D coordinate points describing the scene geometry, through…3 min read·Nov 28, 2021----
Dibyendu BiswasKinectFor measurement model used in SLAM, the most commonly used vision based sensors are 3D/Depth camera which provides 3D data in the form of…4 min read·Nov 28, 2021----
Dibyendu BiswasSigned Distance FieldEuclidean Signed Distance Field (ESDF) & Truncated Signed Distance Field (TSDF), are increasingly being used for collision checking and…4 min read·Nov 28, 2021----